Section: Software
Development work: Robot vision platforms
Participants : Fabien Spindler [correspondant] , Romain Tallonneau.
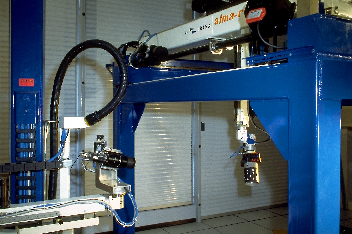
We exploit two industrial robotic systems built by Afma Robots in the nineties to validate our researches in visual servoing and active vision. The first one is a Gantry robot with six degrees of freedom, the other one is a cylindrical robot with four degrees of freedom (see Fig. 2 ). These robots are equipped with cameras. The Gantry robot allows also to embed grippers on its end-effector.
This platform is by far the most-used one by Lagadic members (9 papers published by Lagadic in 2011 enclose results validated on it or data acquired on it). Note that this platform is also open to researcher from other labs. For example, the work done in [24] was validated on the Gantry robot.
These equipments require specific hardware, but also software maintenance actions and new developments in order to make them evolve. Training and assistance of the users, presentation of demonstrations also form part of the daily activities.
To improve the panel of demonstrations and to highlight our research activities, we have developed a new demonstration that combines 3D model-based visual tracking and visual servoing techniques provided in ViSP (see Section 5.1 ) to pick up cubes in order to build a tower. One of the challenges was to automate the initial object localization requested to initialize the tracker. At this end we have developed a generic template pose estimation algorithm based on Surf points of interest matched with the corresponding points provided in a database computed offline during a learning step.